












地下車輛自動駕駛系統
地下車輛自動駕駛系統利用先進的傳感器技術、人工智能與智能控制技術,實現了地下車輛自主行走與無人駕駛,利用先進的無線通信技術、遠程遙控及可視化技術實現鏟運機地下礦料卸載精準作業。

系統功能

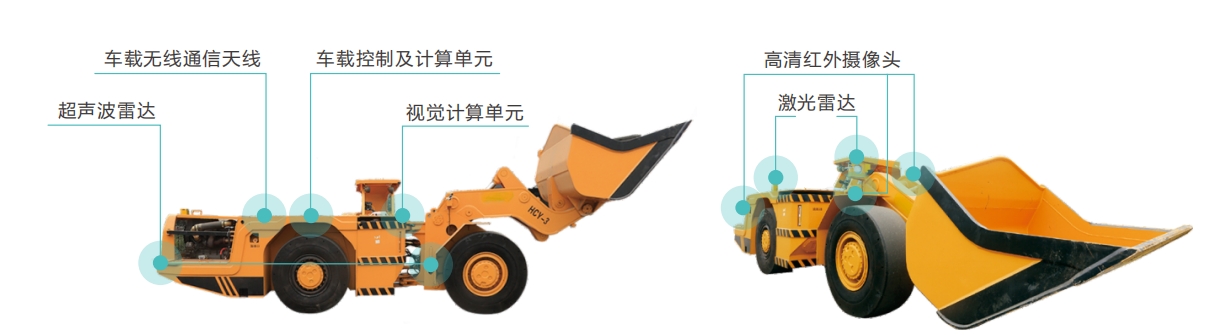
3D 環境感知與建模 搭載多線束激光雷達實時對巷道進行掃描建模并形成可視化地圖,對四周環境進行感知和對車輛行駛進行跟蹤。 |
任務路徑自主規劃智能決策 系統通過示教過程實時采集環境感知數據、定位數據、作業路 |
|
監測維護 實時故障診斷及可視化聲光文字提示,幫助快速鎖定故障點及故障狀態,集成維護保養提醒,定期預見性維護和檢修,減少設備維護時間,提高有效作業時間。 |
精準魯棒跟蹤控制 采用高精度、強實時、高可靠的線控轉向與驅制動技術,對鏟 |

遠程接管 遠程多功能駕駛平臺,包含駕駛座椅左右扶手集成原車操作按鈕、手柄、踏板,還原真實駕駛艙操作,全液晶顯示屏用來顯示井下車輛實時定位信息、行駛速度、欄位信息、爬坡角度等,行駛地圖、路徑以及監控攝像頭的多視角實時畫面,操作人員可對井下車輛進行隨時接管操作。 |
作業統計 實際作業數據統計,自動進行出礦產量跟蹤,生產作業日報表、周報表、月報表、月報表供生產參考決策。 |
|
多源感知目標檢測和識別 通過激光雷達與立體相機實時感知環境數據,采用圖像識別技
|
安全 自動行駛過程中,當有如下情況,車輛暫停運行:激光雷達或 |



我們能幫忙找點什么
服務熱線
地址:長沙高新開發區岳麓西大道2450號環創園C-3棟
版權所有 ? 2025 湖南創遠高新機械有限責任公司