












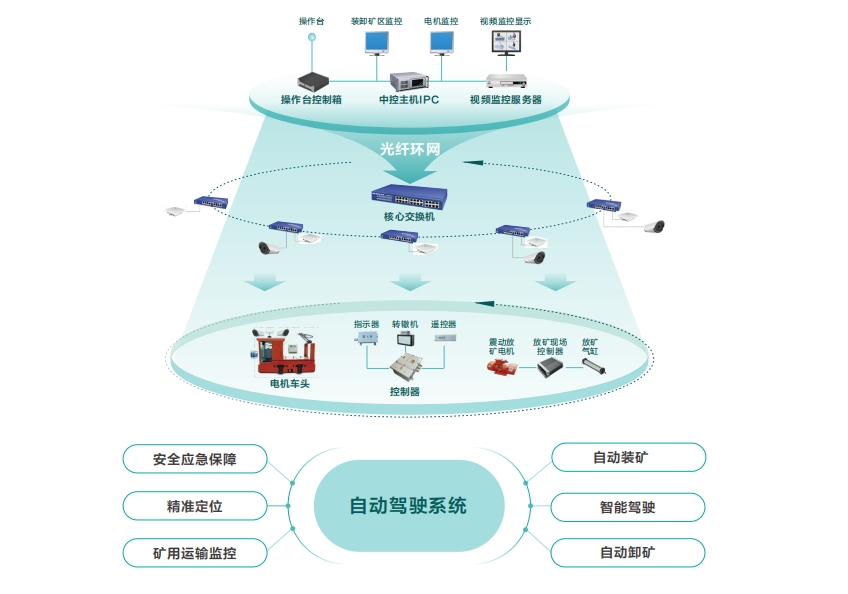
電機車自動駕駛系統
礦用有軌裝備自動駕駛系統是基于AI技術,面向井下低照度、易爆環境的礦用電機車、單軌吊等礦用運輸車輛的無人駕駛系統。系統以高速無線通信、光纖環網或5G通信技術為傳輸平臺,以自主研發的礦用運輸監控系統為安全依托,采用井下機車精確定位技術、GIS技術、機器視覺技術、UWB厘米級定位技術和機車安全應急保障技術,并搭載獨創的機車智能駕駛算法,實現機車物料礦石裝、運、卸全過程的無人化駕駛作業。
系統功能

溜井和放礦坑料位檢測技術 利用我司專門開發的 X 波段雷達和單束激光相結合,自動檢 |
卸載站料位及卡礦監測 料位傳感器實時檢測卸載站中的料位,當車輛行駛至卸載站 |
|
自動裝礦 自動裝礦技術是機車自主運行的關鍵環節,無論在地下還是地 |
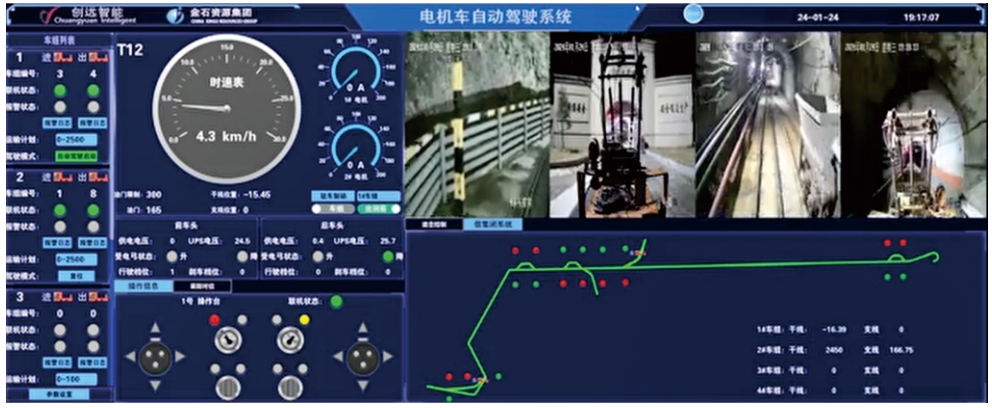
機車無人運行控制 車載控制器通過網絡接受遠程控制中心系統的指令,自動調節 |

機車自主運行變速巡航 基于巡航原理,建立車輛變速巡航模型(自適應巡航模型)。根據生產優化調度軟件模型發出的行車指令,結合軌道/道路客觀分布狀況,即前方直道彎道狀況,是否需要避讓等,實現行車自適應軌道和調度指令,自主調節行車速度,使裝礦、行走、卸礦整個過程達到自主運行,這是1人控制多臺機車的核心所在。
|
|



我們能幫忙找點什么
服務熱線
地址:長沙高新開發區岳麓西大道2450號環創園C-3棟
版權所有 ? 2025 湖南創遠高新機械有限責任公司